Ножничный подъёмник с механизмом Липкина

- Автор(ы): Конорева Мария
- Научный руководитель: Дроботов В.Б., научный сотрудник Московский авиационный институт (НИУ МАИ)
- Учебное заведение: МБОУ "Гимназия №3" г.о. Королев Московской обл., кружок "Юный физик - умелые руки"
Опыт применения беспилотных аппаратов показал актуальность обеспечения радиосвязи между оператором и управляемым объектом. Это требование относится не только к летательным аппаратам, но и к наземной технике.
Цель работы заключается в создании компактного механического устройства, способного оперативно, за единицы секунд, поднять антенну приемно-передающего устройства на достаточную для надежной радиосвязи высоту, а потом при необходимости так же быстро свернуть установку и переместить ее в другое место одним человеком.
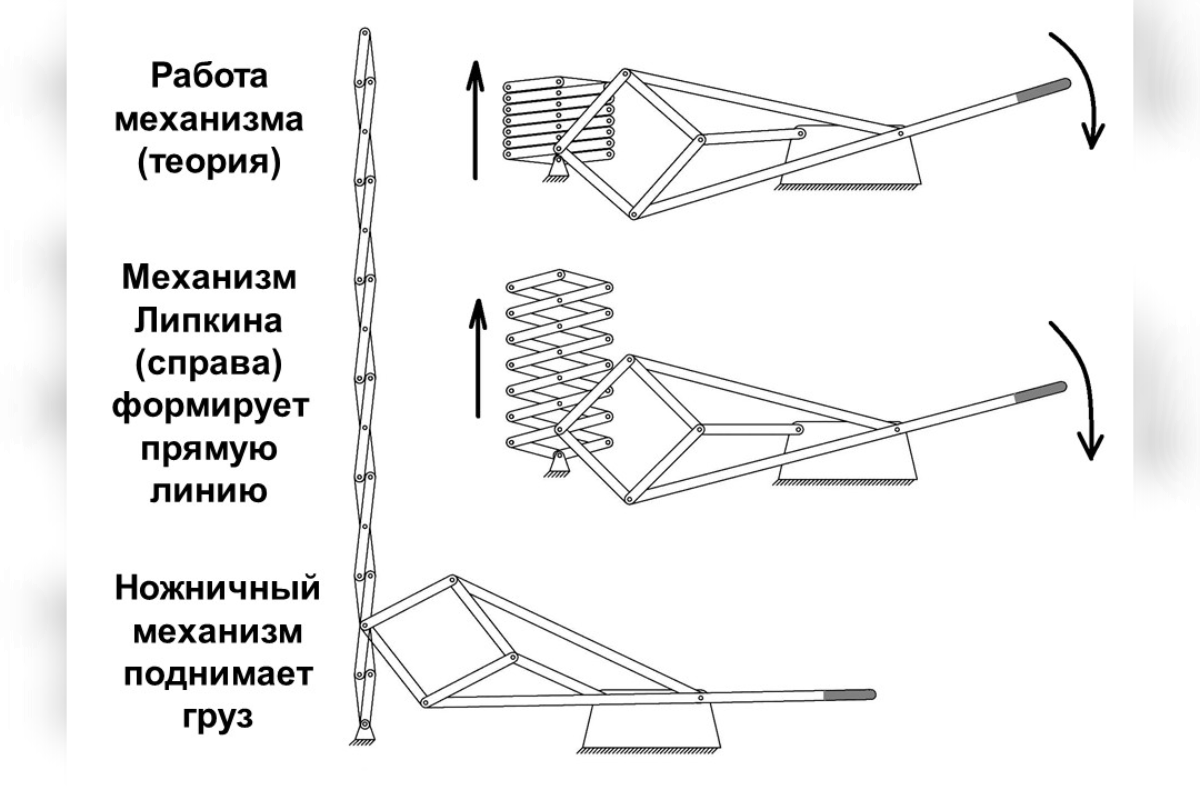
Аналогом выбран «Ножничный подъемный стол (варианты)». Совместно с ножничным механизмом для его развертывания предлагается применить механизм Липкина, который относится к классу инверсорных механизмов, потому что преобразует вращательное движение в движение рабочей точки строго по прямой линии.
По требованию оператора в полевых условиях за 4 минуты наращиваем или снимаем столько ножничных пар, какая высота требуется для антенны. Действующая модель подтвердила предложенное техническое решение и научную гипотезу.
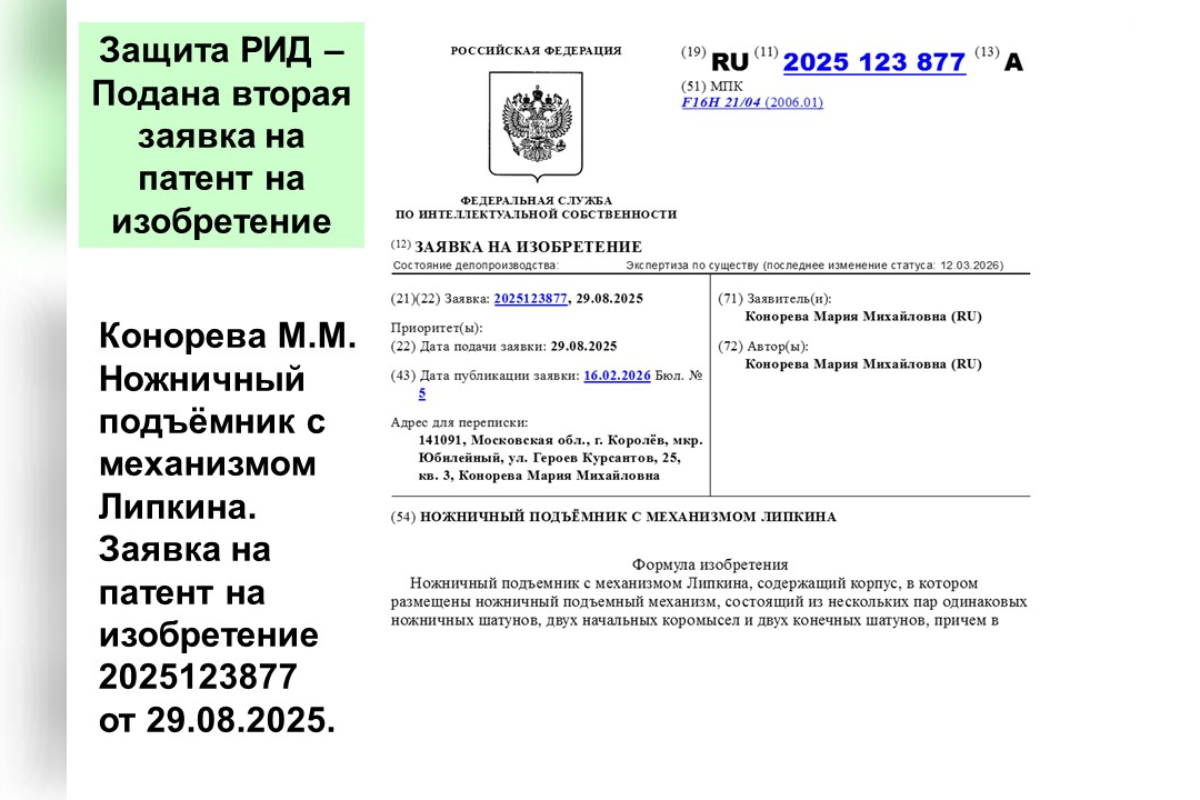
Новизна работы в совмещении двух известных механизмов, на такое техническое решение подана заявка на патент на изобретение.