Прототип интеллектуальной системы потокового перераспределения продукции на Г-образных конвейерных узлах

- Автор(ы): Новоселов Семён
- Учебное заведение: Центр образовательной робототехники и информационных технологий "РобИн", г. Барнаул
Прототип позволяет апробировать механизм, осуществляющий групповое перемещение (транспортировку) 4 единиц хлебобулочных изделий с подающей линии на приемную, расположенную под углом 90°.
Основные механизмы:
- конвейерные ленты;
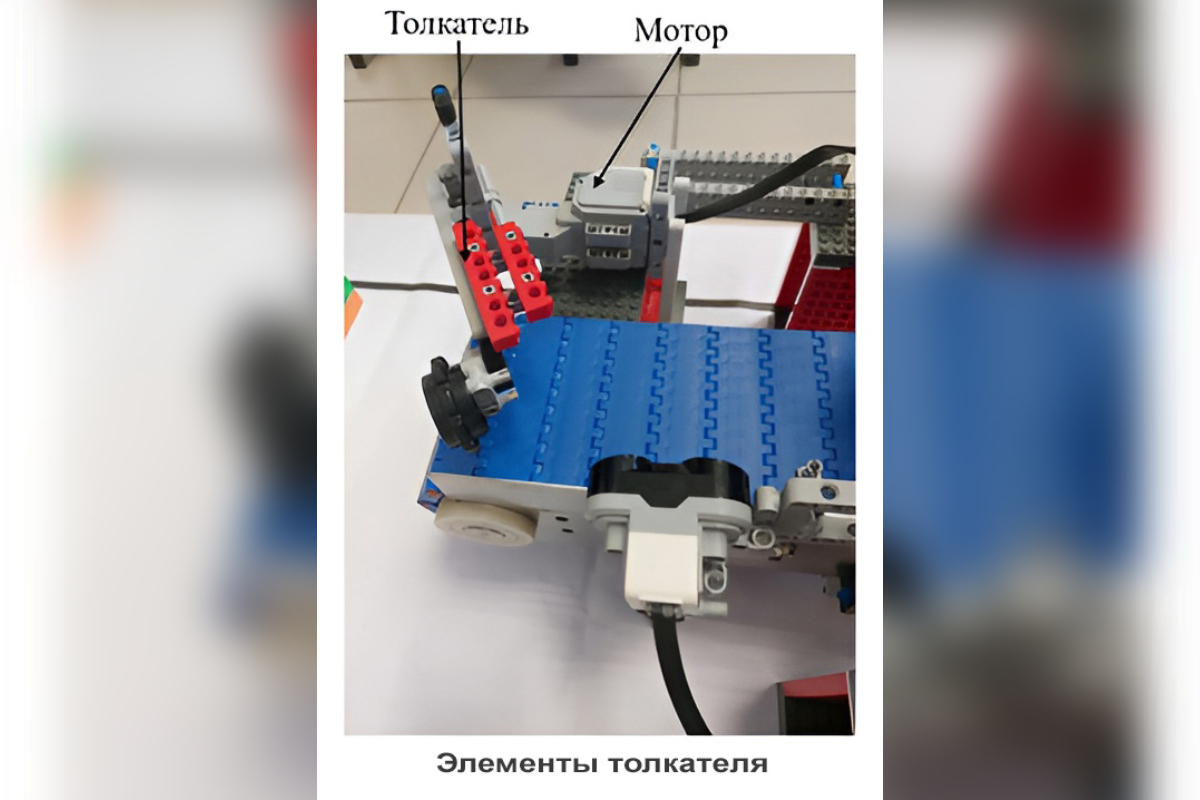
- механизм толкатель-заслонка:
- программа для механизма толкатель-заслонка написана в среде визуального программирования EV3 Classroom.
Дополнительным механизмом проекта является робот-доставщик, обеспечивающий перемещение хлеба от конвейерной ленты в зону доставки. Робот собран из стандартного набора Lego Mindstorms Ev3.
Созданная модель продемонстрировала техническую возможность автоматизации сложного участка конвейера, где требуется изменение направления движения продукции группами. Данное решение может быть масштабировано для реальных хлебозаводов с целью снижения доли ручного труда и увеличения пропускной способности линий.