Стартуем в науку: 3D-манипулятор

- Автор(ы): Бурая Дарья
- Научный руководитель: Иванова Н.В., учитель компьютерного моделирования и изобразительного искусства
- Учебное заведение: ГБОУ Школа № 1694 "Ясенево" им. П.М. Фитина, г. Москва
В современном мире робототехника и автоматизация производства перестали быть атрибутами далекого будущего или исключительно промышленными технологиями. Роботы-манипуляторы сегодня активно применяются во множестве сфер: от сборки автомобилей на конвейерах до сложнейших хирургических операций и исследований других планет. Понимание принципов их работы становится важной частью инженерного образования. Однако большинство существующих учебных моделей слишком сложны для самостоятельного изготовления школьниками. Кроме того, промышленные роботы часто имеют узкую специализацию — один захват предназначен только для одной операции.
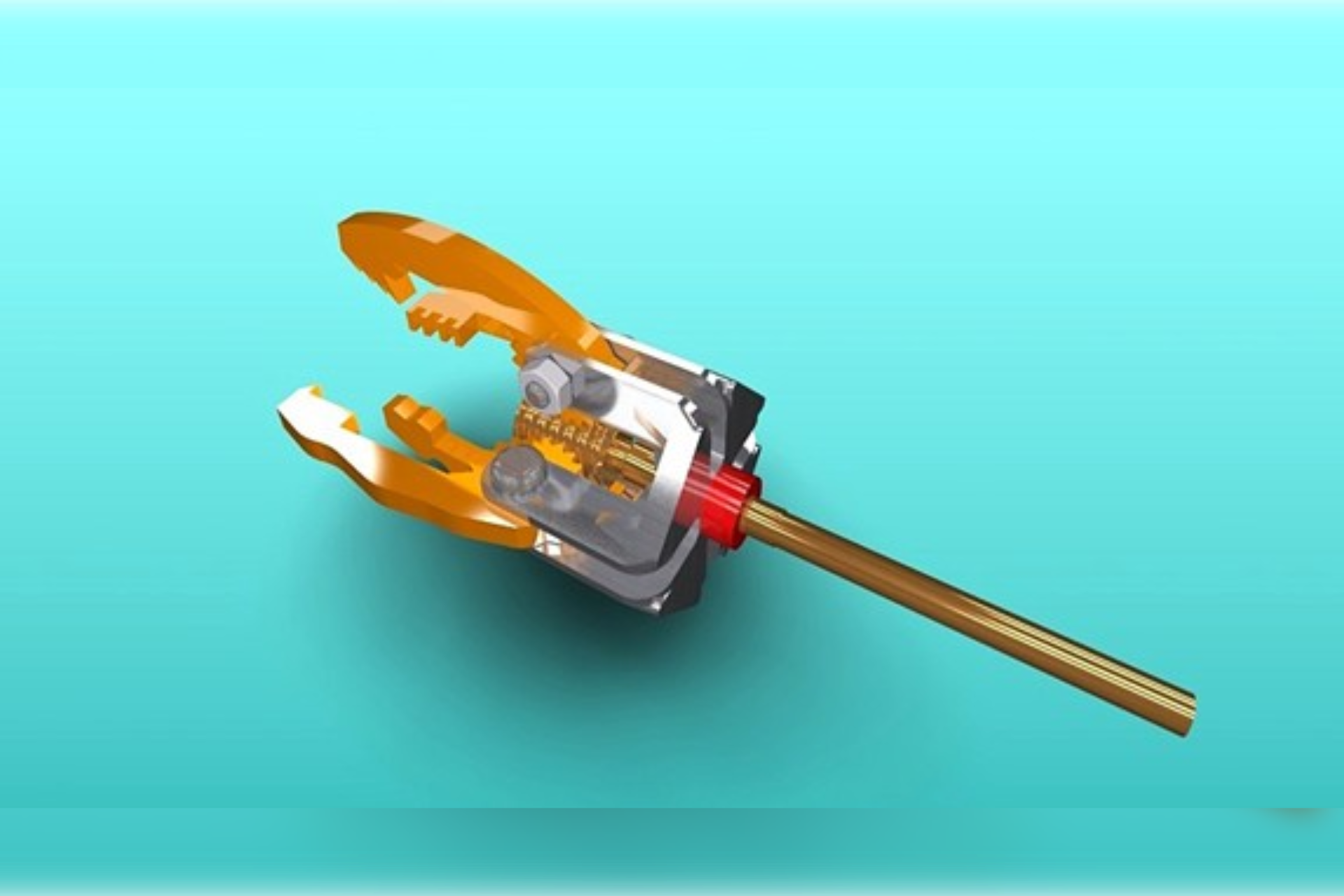
Актуальность моего проекта заключается в создании универсальной, наглядной и доступной для повторения 3D-модели манипулятора. Я решила объединить в одном устройстве два ключевых инженерных решения: червячный механизм и модульную систему со сменными захватами (пальцами). Модель спроектирована как единое целое, но состоит из отдельных деталей, оптимизированных для печати на бытовом FDM-принтере. Использование пластика (PLA/ABS) делает производство устройства экономически выгодным.
Практическая ценность проекта заключается в его высоком образовательном потенциале. Готовая 3D-модель является готовым техническим решением, которое может быть использовано на уроках технологии и физики в качестве наглядного пособия для изучения тем «Механизмы», «Передача движения», «Крутящий момент».