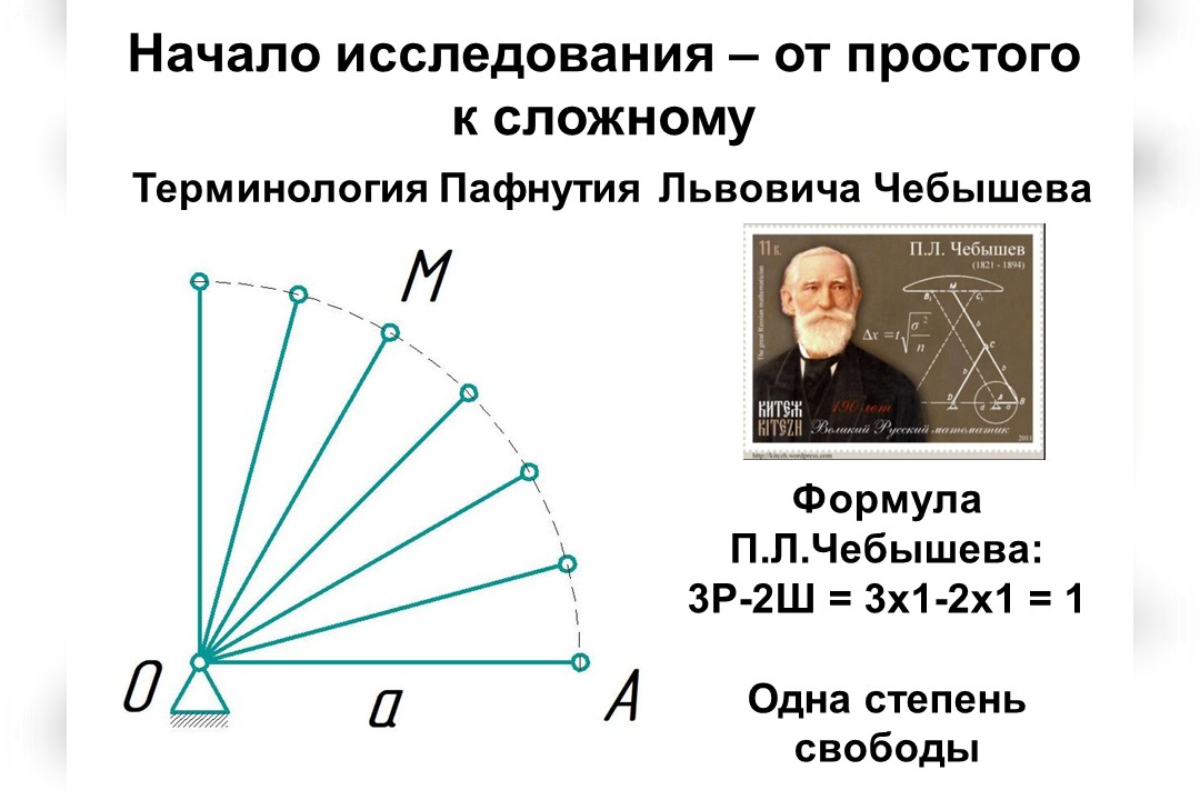
Управление протезом кисти руки человека с минимальным расходом энергии

- Автор(ы): Солдатенко Владислава
- Научный руководитель: Золотаревич В.П., кандидат технических наук, доцент НИУ Университет ИТМО (Факультет Системы управления и робототехника (СУиР))
- Учебное заведение: НИУ Университет ИТМО, г. Санкт-Петербург
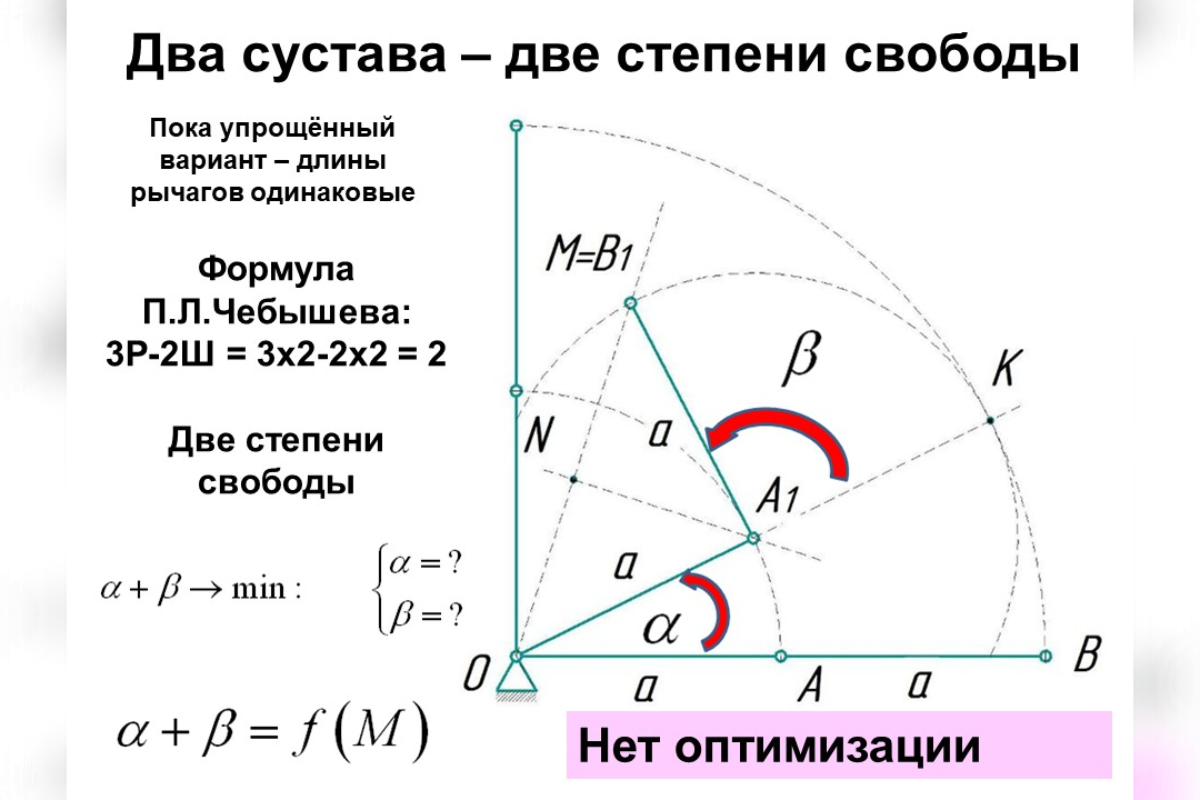
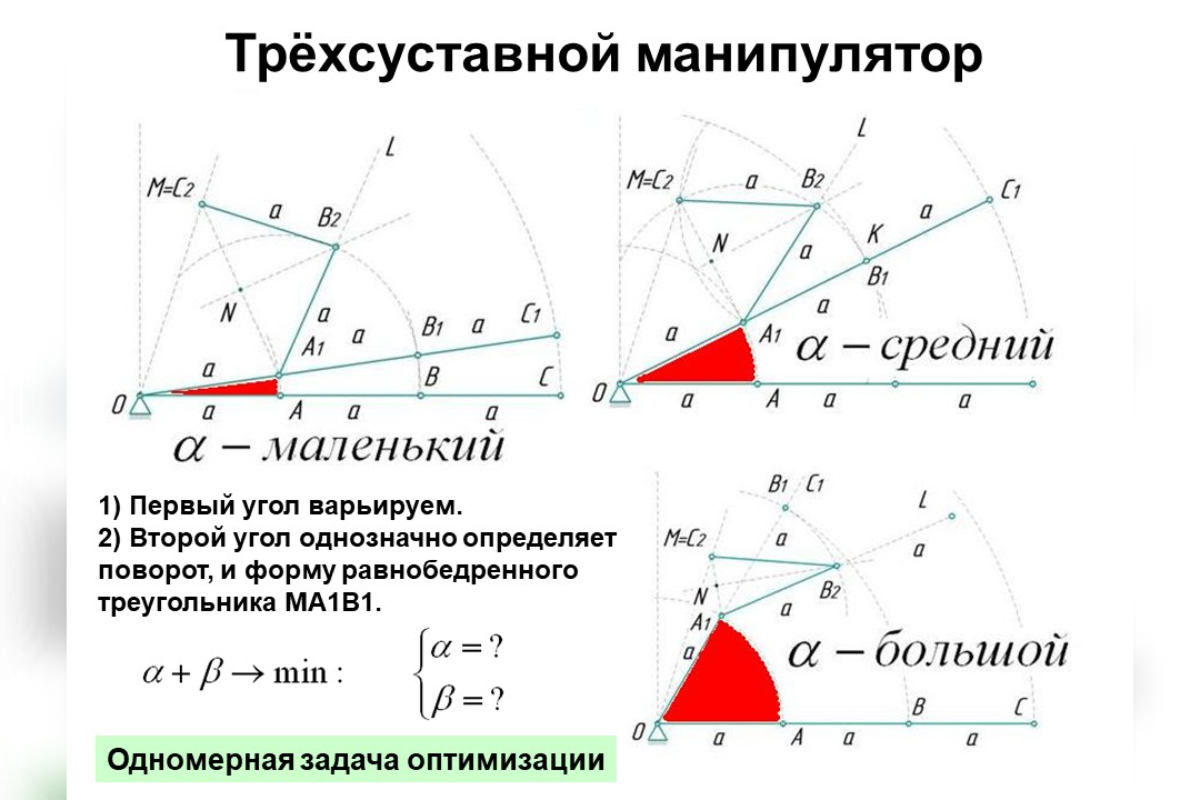
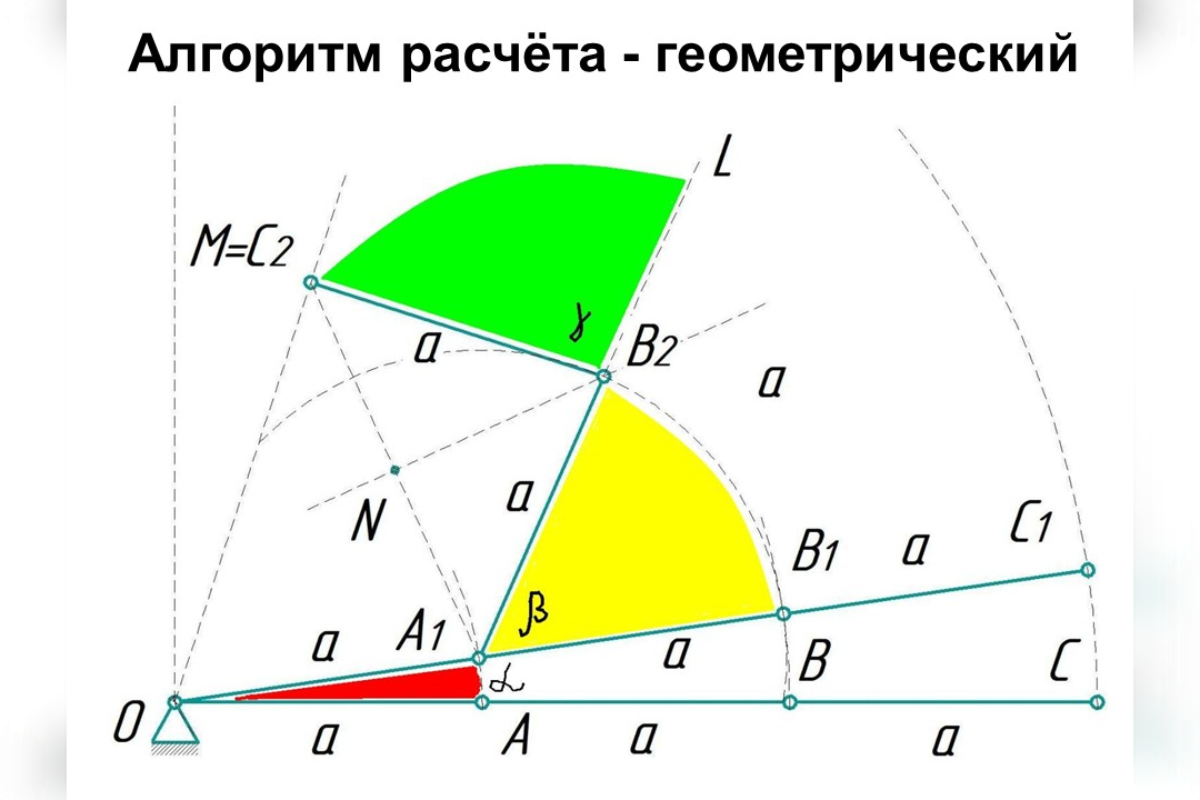
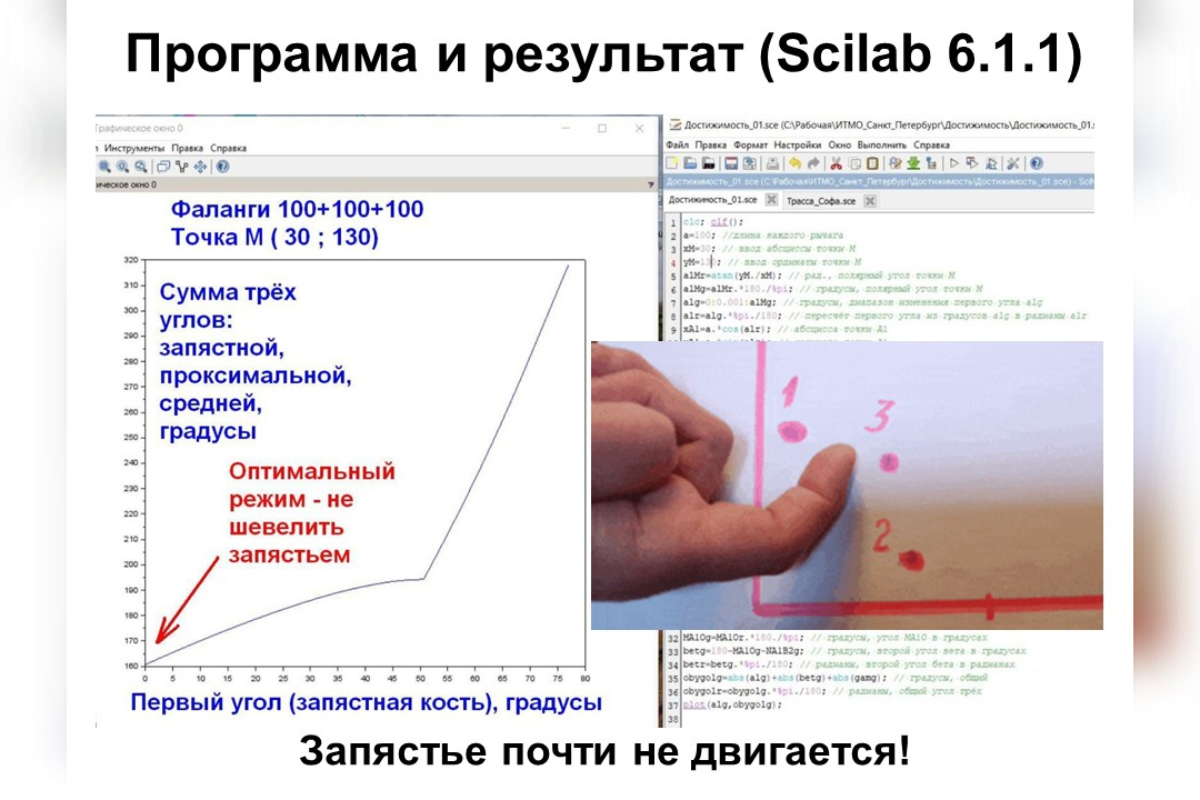
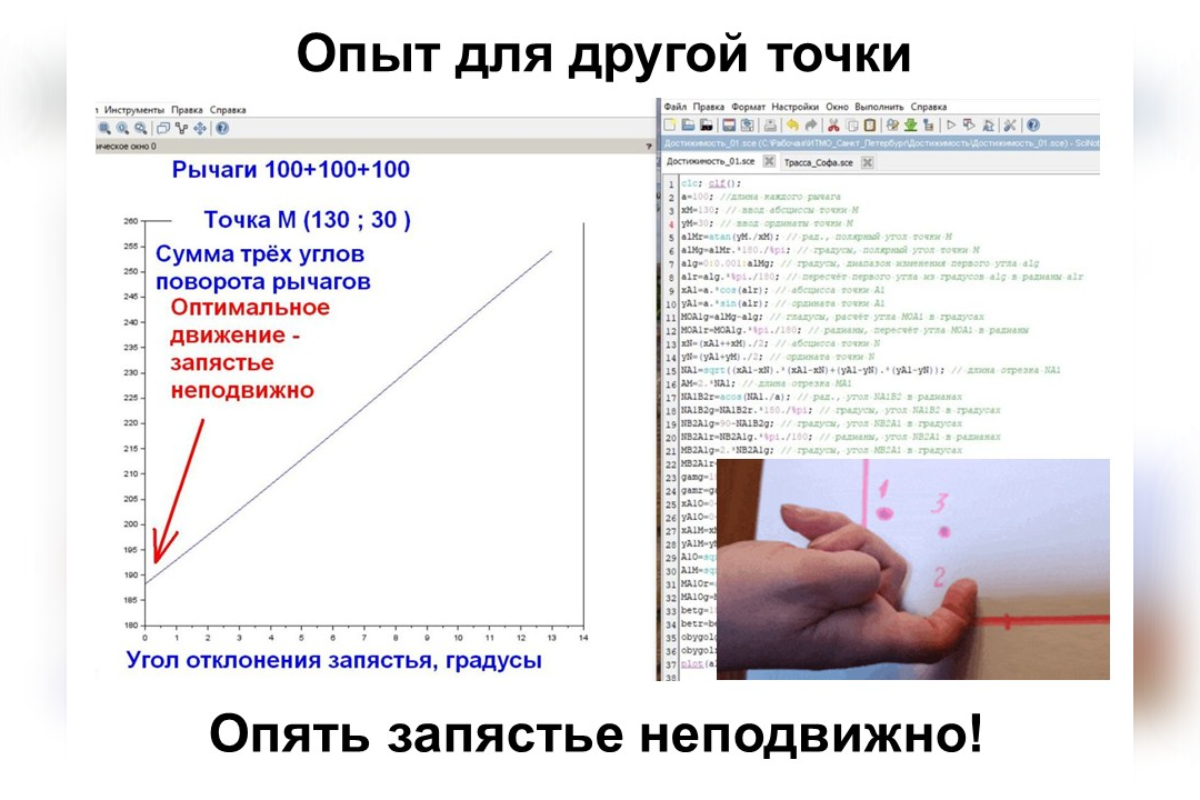
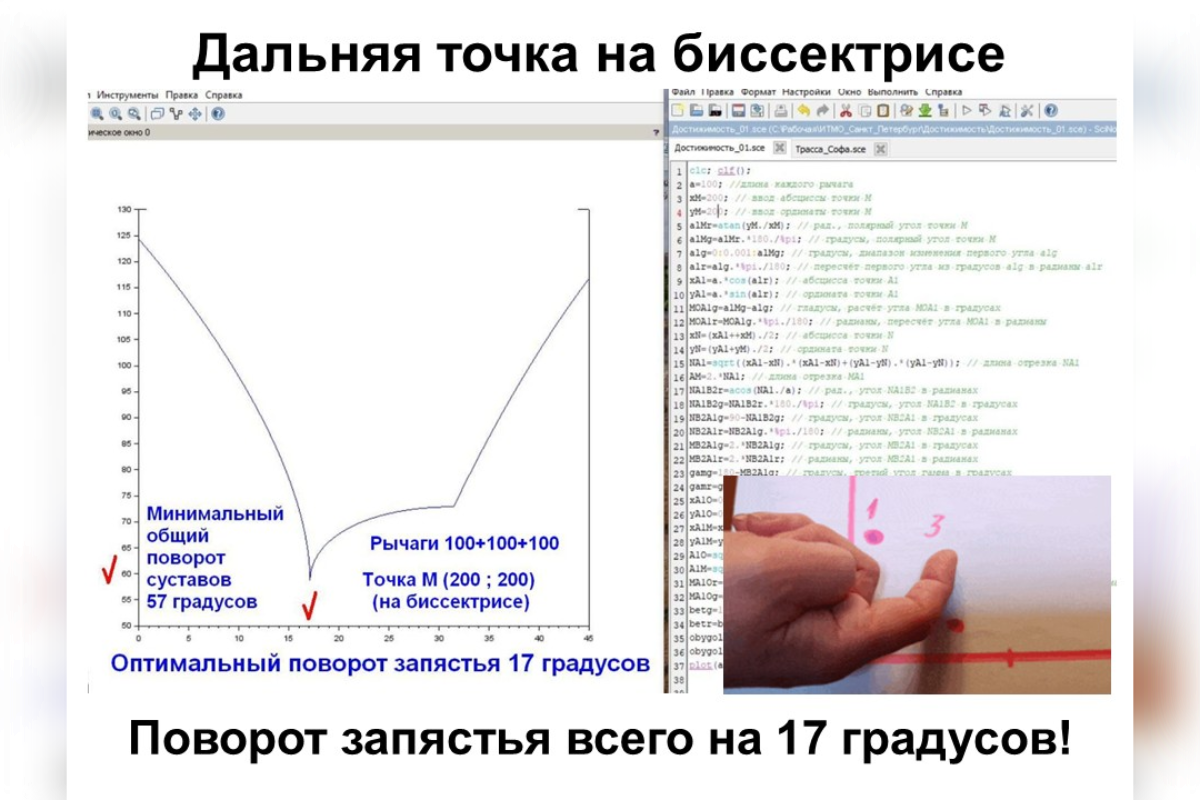
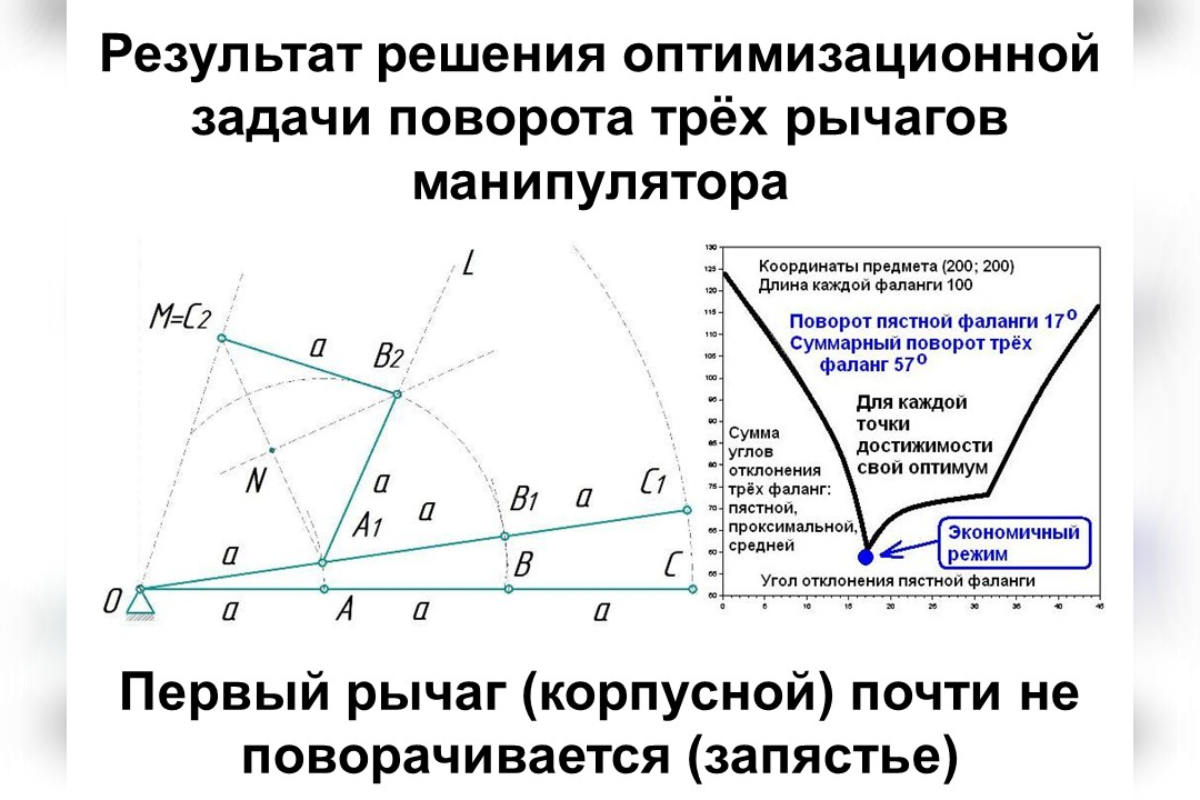
Цель работы заключается в оптимизации режима работы шарнирного манипулятора, состоящего из трех рычагов. В качестве критерия оптимизации выбрана сумма углов поворота рычагов относительно нейтральных линий. Минимизация такой суммы соответствует экономичному режиму работы механизма с минимальной затратой энергии. Для достижения цели работы решена задача о достижимости манипулятором заданной точки с минимальным расходом энергии. Задача решена аналитически с помощью геометрических преобразований с последующей реализацией предложенного алгоритма в виде компьютерной программы.
Результатом работы стал алгоритм вычисления трех оптимальных углов поворота рычагов, который соответствует анатомическому строению кисти руки и важен для создания бионических протезов с уменьшенным расходом энергии.
Перспектива работы заключается в развитии следующих направлений исследования:
- Переход к более точной математической модели пальца человека, предполагающей четыре сустава: пястный, проксимальный, средний и дистальный.
- Учет реальных размеров каждого сустава по осредненным данным или по конкретному человеку, для которого выполняется протезирование.
- Разработка алгоритмов оптимальных режимов работы четырехсуставного манипулятора: экономичного - с минимальной затрачиваемой энергией, скоростного - с наиболее быстрым захватом предмета, силового – с наиболее сильным удержанием предмета и др.