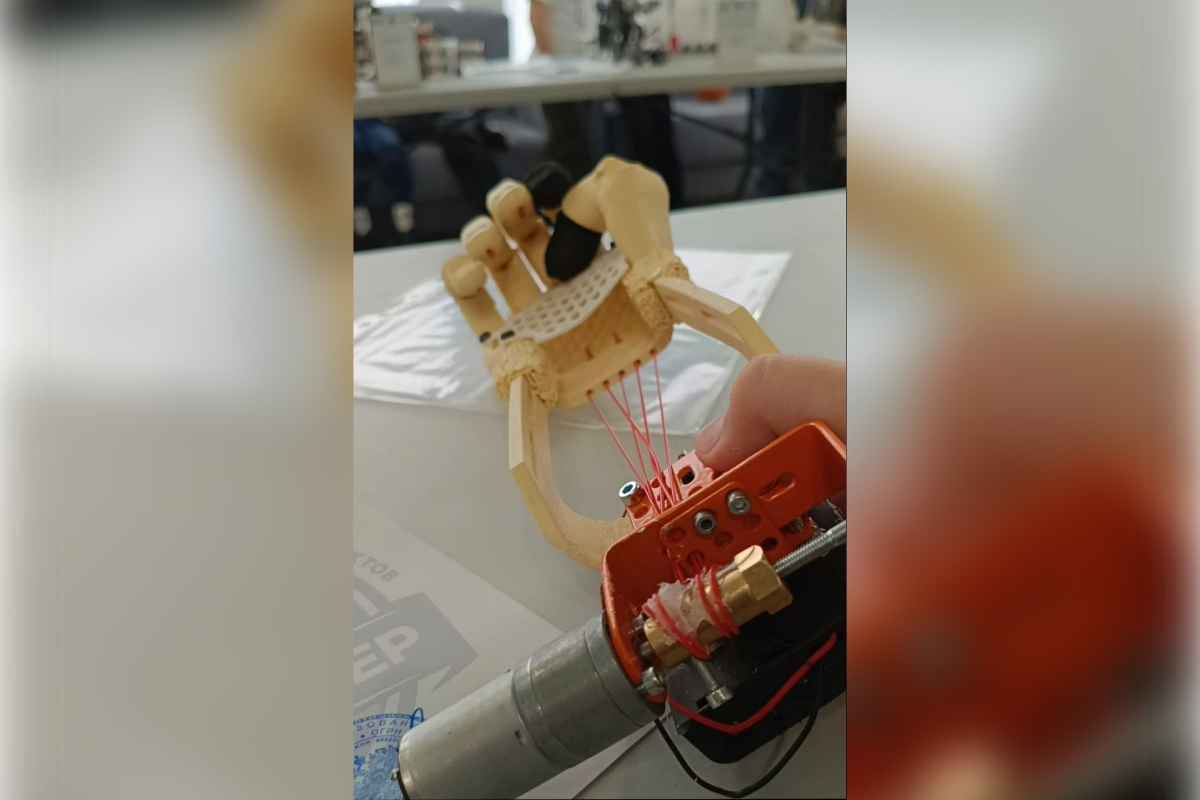
Робо-рука

- Автор(ы): Картоев С.Б., Евлоев А.А.
- Научный руководитель: Тангиев И.М.
- Учебное заведение: ГБУ ДО Республиканский детский технопарк «Кванториум», г. Магас
В современном мире роботизированные манипуляторы широко применяются в промышленности, логистике и образовании. Однако их промышленные аналоги часто сложны и дороги. Авторы проекта поставили перед собой задачу: спроектировать и собрать функциональную модель робо-руки с тросовой передачей из доступных материалов, собственными силами, пройдя полный цикл – от кинематической схемы до тестирования.
Робо-рука уверенно захватывает и удерживает предметы массой до 5 г, выполняет цикл «захват – перенос – отпускание» за 3-4 секунды. Механизм работает стабильно, без рывков и самопроизвольного раскрытия. Робо-рука демонстрирует стабильную работу и может служить как учебный прототип, так и основа для дальнейшего коммерческого или образовательного применения.
Эффективность использования материалов: 95 % деталей применены повторно.
Ориентировочная рыночная стоимость модели (при серийной сборке из доступных компонентов): 2 500-4 000 рублей.
«От кинематической схемы до готового механизма — полный цикл своими руками».