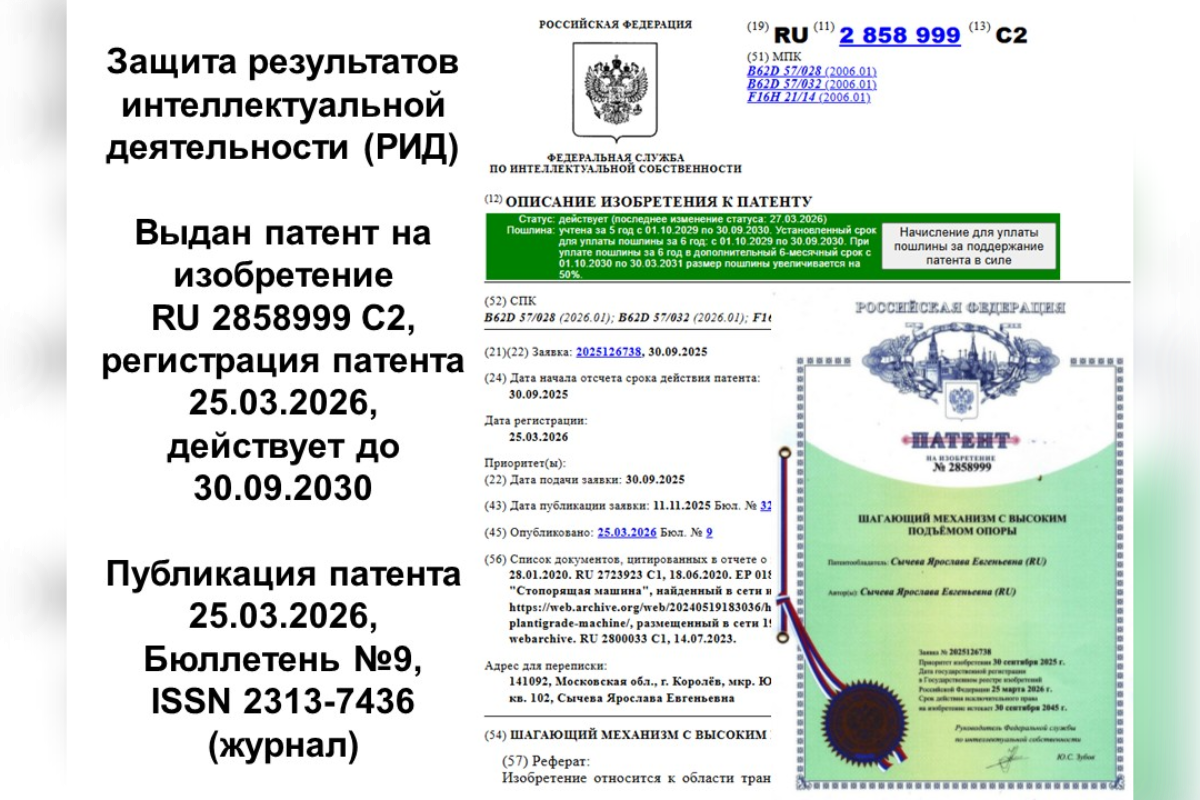
Шагающий механизм с высоким подъёмом опоры

- Автор(ы): Сычева Ярослава
- Научный руководитель: Лебедев В.В., доктор технических наук, руководитель кружка "Юный физик - умелые руки"
- Учебное заведение: МБОУ "Гимназия №5" г.о. Королев Московской области, Благотворительный фонд "Образование+", кружок "Юный физик – умелые руки"
Объектом исследования является новый шагающий механизм. Предлагаемый механизм изучается на предмет повышения проходимости транспортного средства за счет увеличения высоты подъема шагающей опоры.
Цель работы заключается в повышении проходимости шагающего механизма. Для этого надо решить техническую задачу увеличения высоты шага.
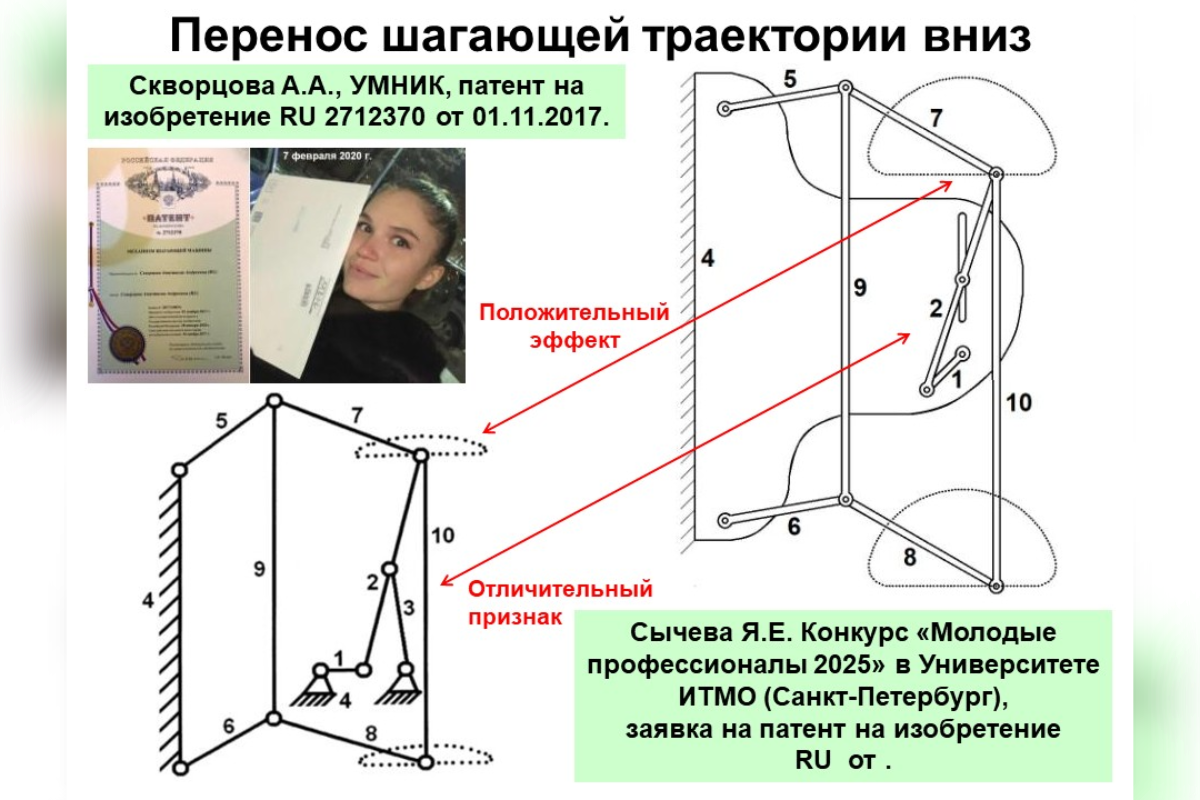
В новом механизме предложено смещение шагающей траектории сверху вниз механизмом двойного параллелограмма, как в патенте А.А.Скворцовой. Недостаток шагающего механизма А.А.Скворцовой сохранился прежним, заключается в малой относительной высоте шага, равной приблизительно 20% от рабочего горизонтального опорного участка рабочей траектории.
Техническая реализуемость предлагаемого устройства доказана изготовлением действующих моделей предложенного шагающего механизма с высоким подъемом опоры и сравнением с разработанными ранее устройствами.
Новизна работы:
- новый механизм задает шагающую траекторию с увеличенной высотой шага, выполненный по кинематической схеме «Кривошипно-ползунного прямолинейно-направляющего механизма»;
- применение новой связи «Кривошипно-ползунного прямолинейно-направляющего механизма» с механизмом двойного параллелограмма, при которой сформированная шагающая траектория с высоким шагом смещается вниз.
Предложенный механизм имеет одну степень свободы. Это означает, что положение всех деталей в предложенном механизме однозначно определяется одной характеристикой, например, углом поворота кривошипа, как это часто принято при проектировании механизмов и машин. Следовательно, теоретически доказана работоспособность нового механизма.
Gодана авторская заявка и получен патент на изобретение, выполнена досрочная публикация материалов заявки.
Видеоролик проекта: Шагающий механизм с высоким подъёмом опоры