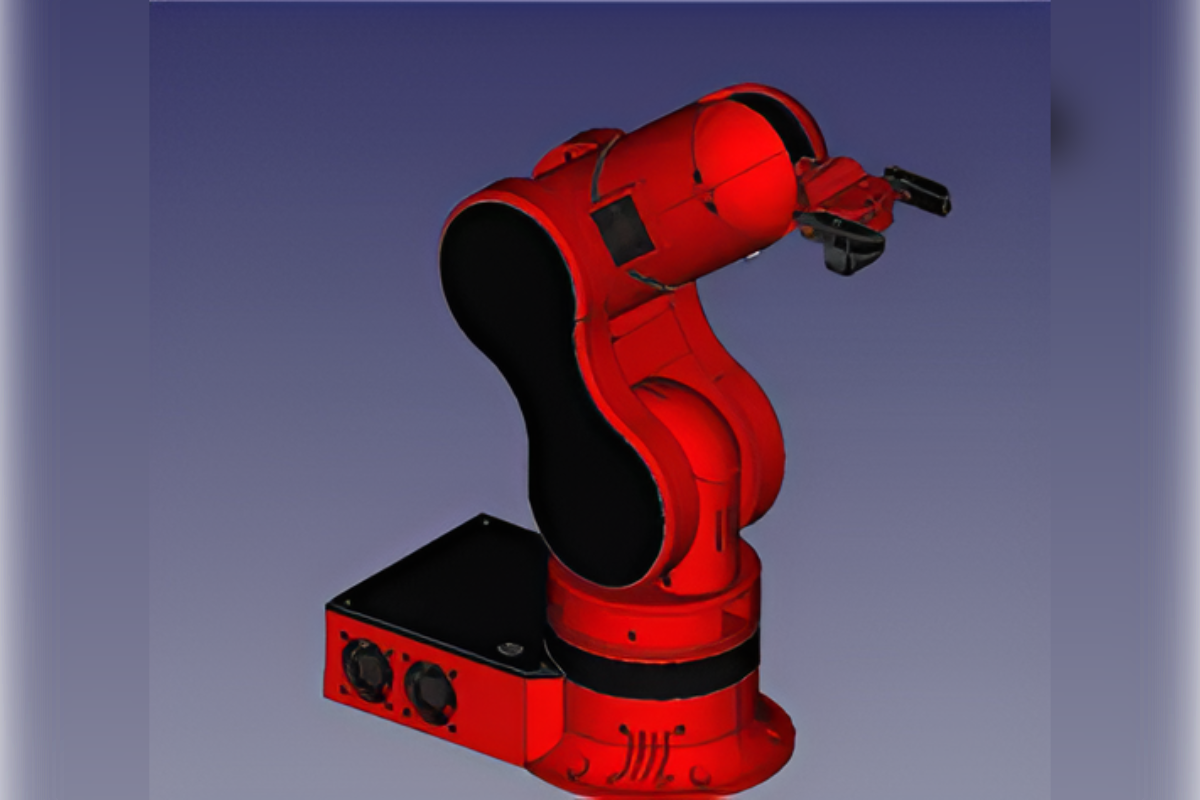
Создание роботизированного манипулятора с шестью степенями свободы
- Автор(ы): Руденко М., Котик А., Руденко В.
- Научный руководитель: Руденко А.В., педагог ГБОУ СОШ № 644 Приморского района Санкт-Петербурга
- Учебное заведение: ГБОУ Лицей № 533 «Образовательный комплекс "Малая Охта" Красногвардейского района Санкт-Петербурга, ГБОУ СОШ № 644 Приморского района Санкт-Петербурга, ГБОУ ДО Дворец творчества детей и молодежи «Молодежный творческий Форум Китеж плюс», г. Санкт-Петербург
Но как быть, если очень необходим в быту электронный партнер? Создание домашнего робота является важной и полезной задачей. Мы сделаем доступного робота-помощника для дома. Использование 3D-принтера позволяет сделать проект доступным по цене. Это будет быстро и недорого. Шесть степеней свободы помогут роботу ловко двигаться в комнате. Он сможет переставлять чашки или собирать мелкие игрушки, помогать при сортировке деталей и конструировании изобретений школьников-инженеров.
Манипулятор будет работать с помощью платы FlySuper8Pro. Плата является «центром управления» изделием и выступит в качестве координатора работы каждого элемента системы.
Созданное изделие сможет осуществлять разные вещи:
- перемещение предметов между заданными точками, например, перекладывание посуды из сушилки на полку;
- сортировка мелких предметов: канцтоваров, деталей конструктора, гаек и болтов в домашней мастерской;
- подача инструментов в рабочей зоне.
Создание такого изделия поможет понять основы конструирования, работы на 3D-принтере, разобраться в радиоэлектронике, свойствах материалов и др.